Cap sur l’intégration mécanique (partie 3)
-68353.jpg)
1. Introduction
Dans l’article précédent, nous avons vu sur un exemple concret l’impact que peut avoir un choix d’architecture “mécanique” sur la facilité de mise en oeuvre et sur les coûts de fabrication d’un dispositif électronique de puissance (bras de pont à IGBT associé à sa commande et aux capteurs permettant son monitoring). Nous allons maintenant nous intéresser à la validation “fine” de l’intégration à un boîtier lorsque des connecteurs et des éléments de dialogue homme/machine sont contraints mécaniquement par le PCB sur lequel ils sont fixés mais aussi sur des orifices placés sur le boîtier (en l’occurrence une face avant). Puisque le seul prototype finalisé est celui basé sur 2 PCBs et non 5, c’est donc ce premier design qui sera utilisé pour illustrer le propos de cet article.
2. Intégration mécanique globale
2.1. Le boîtier
L’insertion des différents constituants du boîtier peut se faire en bloc à l’aide d’un fichier STEP contenant l’ensemble des pièces que l’on juge utiles pour la vérification de l’intégration du PCB. Dans notre cas, seule une des faces est réellement importante (celle dans laquelle est glissée la carte principale). Pour cela, une extraction de cette seule pièce du modèle complet du boîtier a été effectuée à l’aide de l’application en ligne Onshape puis sauvegardée dans un fichier STEP dédiée.
Une fois cette extraction effectuée, elle a été incorporée dans le design de la carte principale à l’aide de la commande classique Place > 3D body comme illustré à la figure 1.
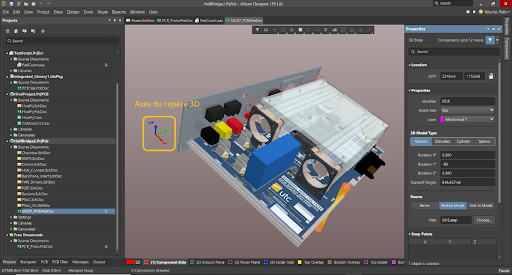
Il est alors important de correctement positionner cet objet dans l’espace à l’aide des propriétés accessibles dans l’onglet apparaissant à droite de l’écran lorsque l’on double-clique sur l’objet en question (cf. Figure 2). En effet, il est possible de positionner en X-Y un tel objet à l’aide de la souris mais la translation suivant l’axe Z utilise le paramètre noté Standoff Height. En outre, si une rotation de l’objet est requise, il faut alors la configurer à l’aide des paramètres Rotation X°, Y° et Z° correspondant à des angles (en degrés) autour des axes entourés sur la figure 2.
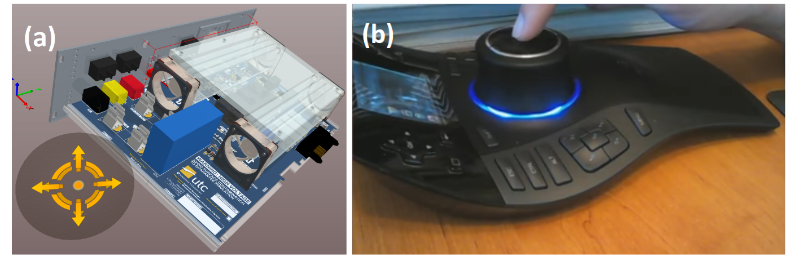
Pour la visualisation, la modification du point de vue s’avère également particulièrement utile pour un positionnement précis des composants en 3D et pour cela, on peut utiliser :
- soit une souris classique en utilisant le clic droit pour effectuer des translations du point de vue (sans changer son orientation) soit Control + Clic droit pour pouvoir effectuer des rotations visualisables avec la sphère d’orientation (Figure 3(a)),
- soit une souris 3D telle que celles proposées par la société 3Dconnexion (cf. SpaceMouse Enterprise à la Figure 3(b))
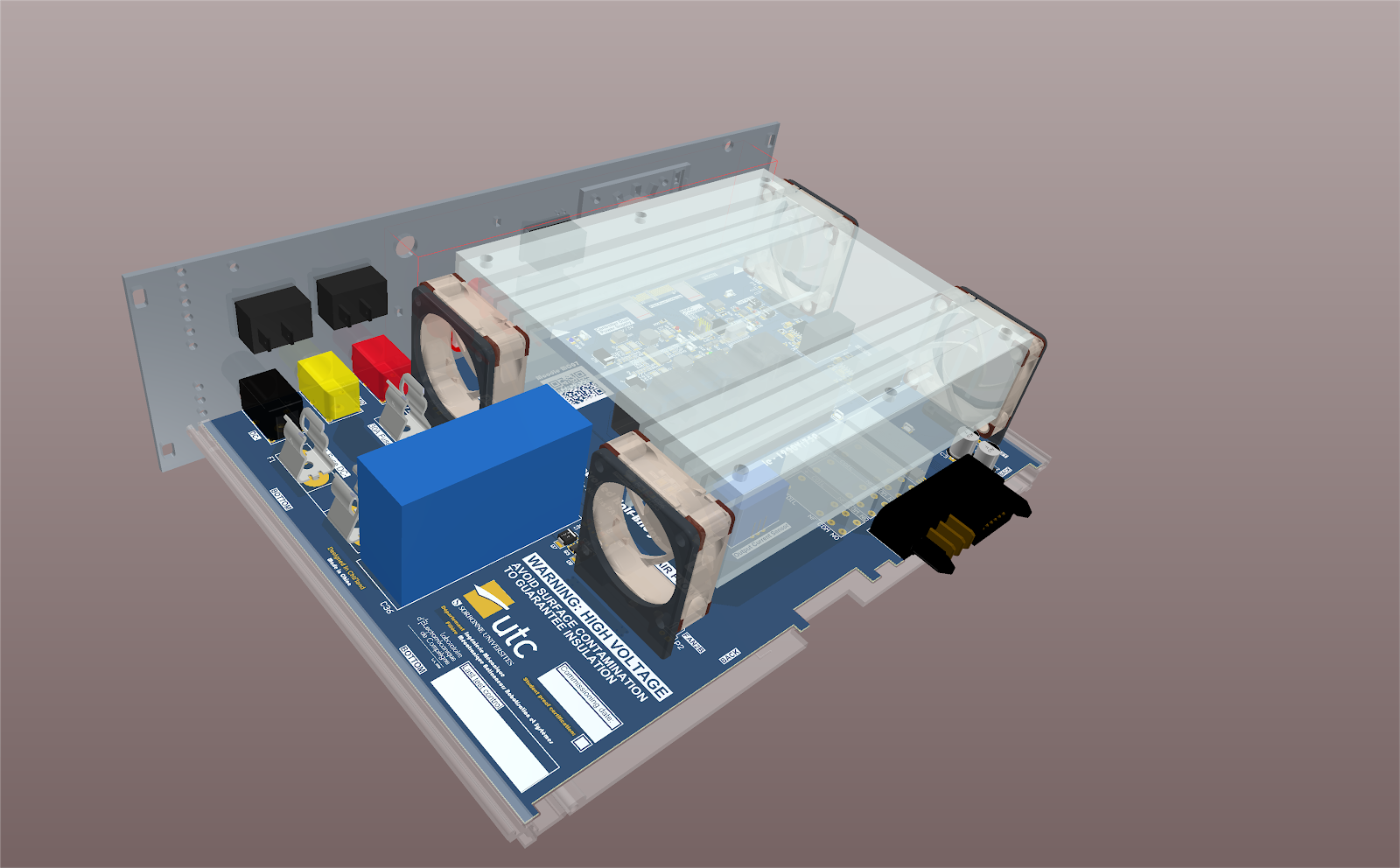
Comme on peut le voir à la Figure 4, certaines pièces sont solidaires du PCB (notamment le bloc de raccordement entre le module IGBT et le PCB, ainsi que les équerres sont lesquelles sont montés les ventilateurs) tandis que d’autres telles que le dissipateur thermique sont montés sur le boîtier . Etant donné l’espace très limité existant entre les ventilateurs et le dissipateur ainsi que les contraintes de hauteur disponible entre ce dissipateur et certains composants montés sur la carte (relais, capteur à effet Hall, bloc de raccordement), il est important de pouvoir visualiser le dissipateur tout en occultant pas totalement ce qui se trouve derrière.
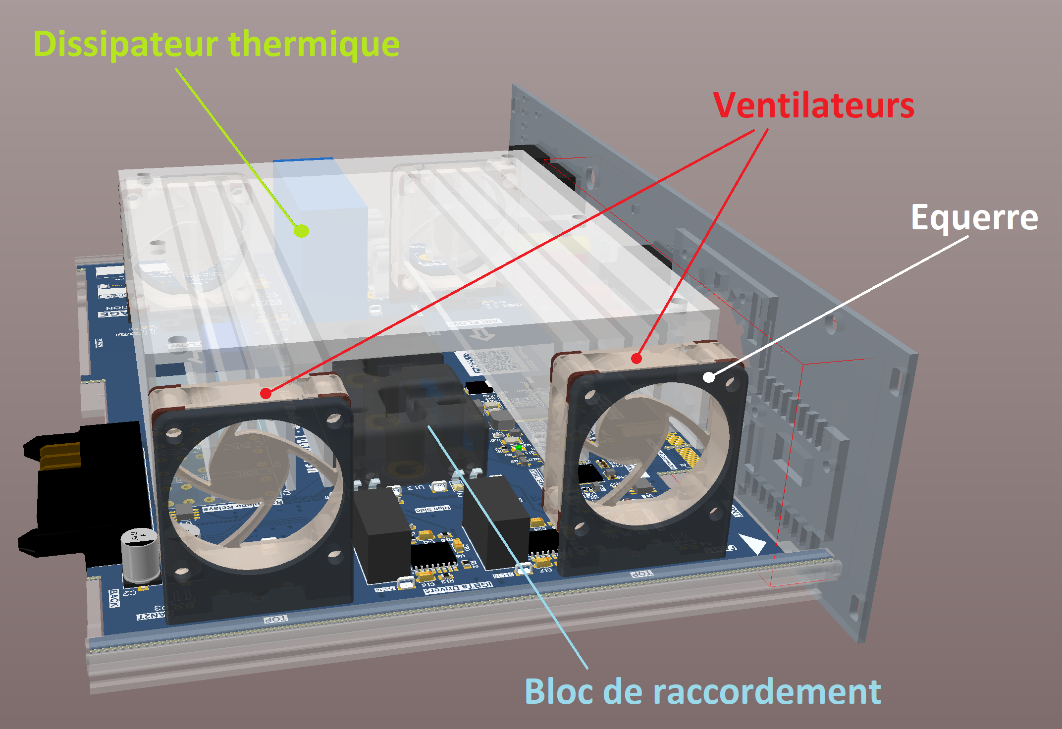
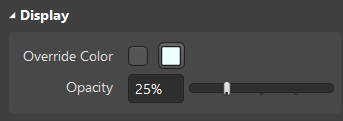
Pour une représentation transparente d’un objet 3D, une fois encore, il faut modifier un paramètre situé en bas de l’onglet Properties nommé Opacity. Dans le cas du dissipateur, il a été réglé à 25% comme on peut le voir ci-dessous:
2.2. La face avant
La face avant de ce boitier dispose de trous standardisés de manière à le placer dans un rack 19 pouces. Et pour la réaliser avec une qualité professionnelle, l’usage d’un routeur (sorte de fraiseuse) est indispensable (trous avec méplat pour les BNC par exemple). Voici une liste non exhaustive de fournisseurs de telles plaques usinées :
- la société Schaeffer AG avec le logiciel « Designer de faces avants » téléchargeable ici,
- la société Beta-Layout avec le logiciel « Target 3001 » téléchargeable ici.
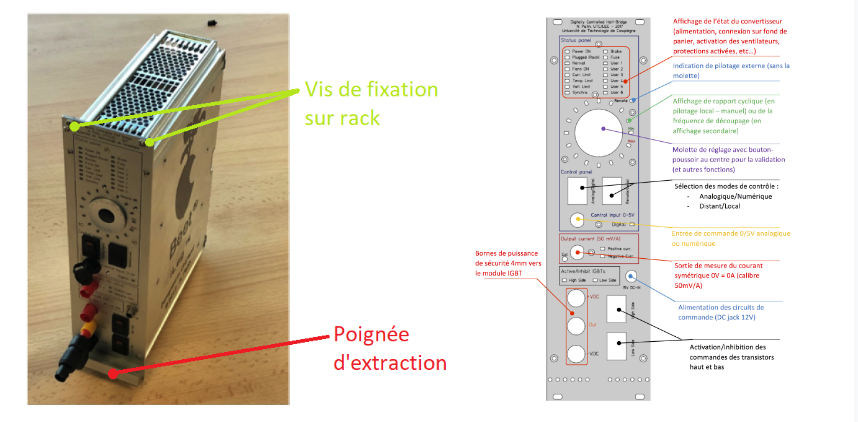
Dans le cadre de ce projet, j’ai utilisé la première solution avec le logiciel dédié. Il permet notamment de s’appuyer sur une bibliothèque de formats standard de modules 19” comme ici le format 6U (de largeur 14 HP). La face avant est alors prédécoupée pour pouvoir accueillir des vis de fixation sur le rack ainsi que celles permettant le montage d’une poignée d’extraction (cf. figure 5).
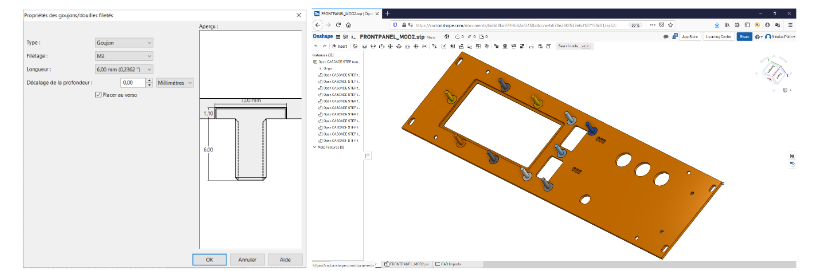
En outre, le logiciel (Designer de faces avants) permet non seulement de passer commande de la face avant mais il permet aussi de produire un fichier STEP ré-exportable sous Altium Designer et/ou sous un logiciel de CAO mécanique.
Remarque : L’exportation STEP n’inclut pas tous les détails (gravures notamment) mais contient tous les trous et comporte également d’éventuels goujons placés à l’arrière de la face avant (cf. figure 6) pour la fixation d’un circuit imprimé. Il s’agit des données essentielles pour vérifier que l’assemblage du PCB est bien possible.
3. Conclusion
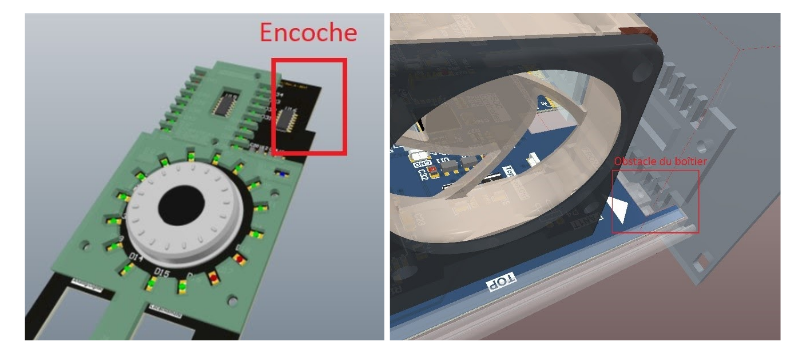
Le présent article avait pour objectif la mise en œuvre des capacités 3D d’Altium Designer à l’échelle d’une carte électronique pour analyser son interaction (mécanique) avec son environnement, à savoir un boîtier ou d’autres éléments présents à proximité. Ces fonctionnalités sont particulièrement importantes lorsque l’on souhaite minimiser les coûts et les délais associés à un prototypage. En effet, de multiples erreurs peuvent être détectées de manière virtuelle grâce à cet outil. Je ne citerai ici qu’un seul exemple (illustré à la figure 9) : l’encoche réalisée en haut de la carte de face avant a été nécessaire à cause de la forme « complexe » de l’intérieur de la face latérale du boîtier (servant à accueillir une vis auto-taraudeuse).
Dans un quatrième article, nous reprendrons ce sujet d’étude en traitant plus particulièrement de l’interaction entre deux cartes (ou plus). Ce sera d’ailleurs l’occasion de revenir sur la version basée sur 5 cartes (au lieu des 2 initiales) et il sera alors intéressant de traiter en parallèle :
- une approche “classique” (utilisée pour la version initiale) consistant à importer un modèle 3D d’une carte (celle de la face avant) dans le projet d’une deuxième carte (carte principale)
- Une deuxième méthode basée sur un projet « Multi-board » comme le prévoit le logiciel Altium Designer.